Welcome to my corner of the web.
I’m Micheale Haileslassie Gebrezgiher, an undergraduate student at Chonnam National University (GKS-U scholar) and a research assistant at AIRLab.
Selected works
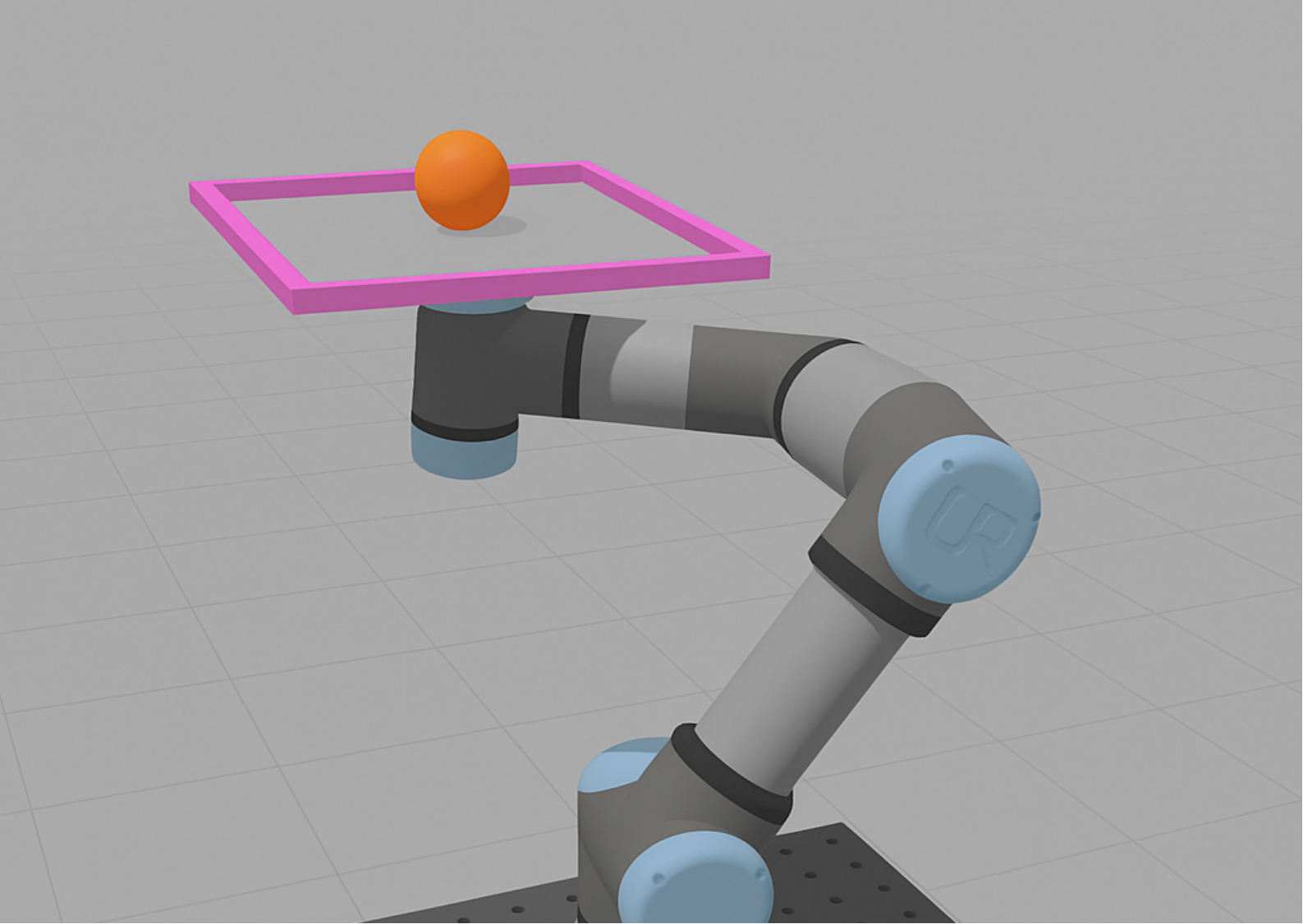
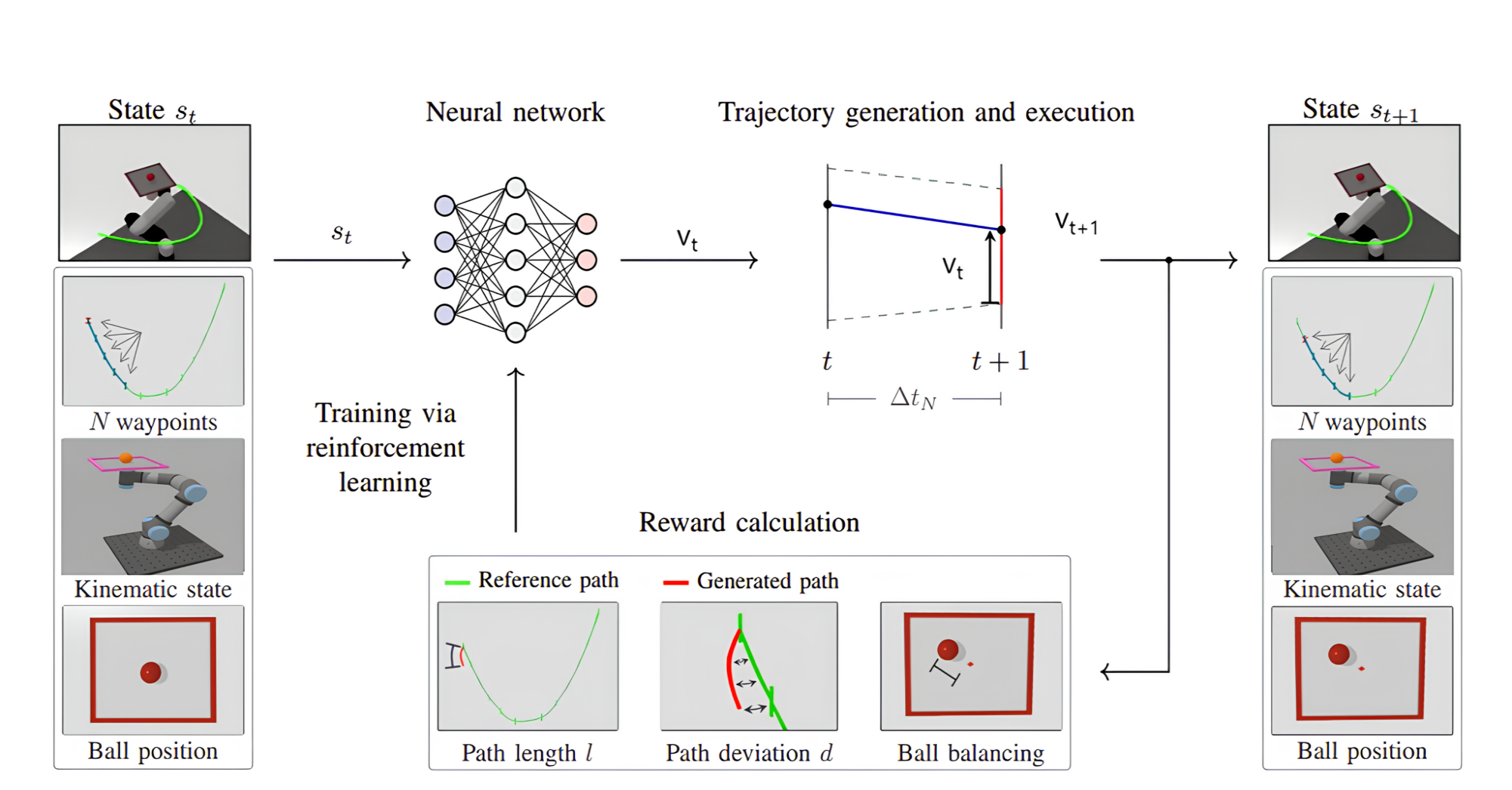
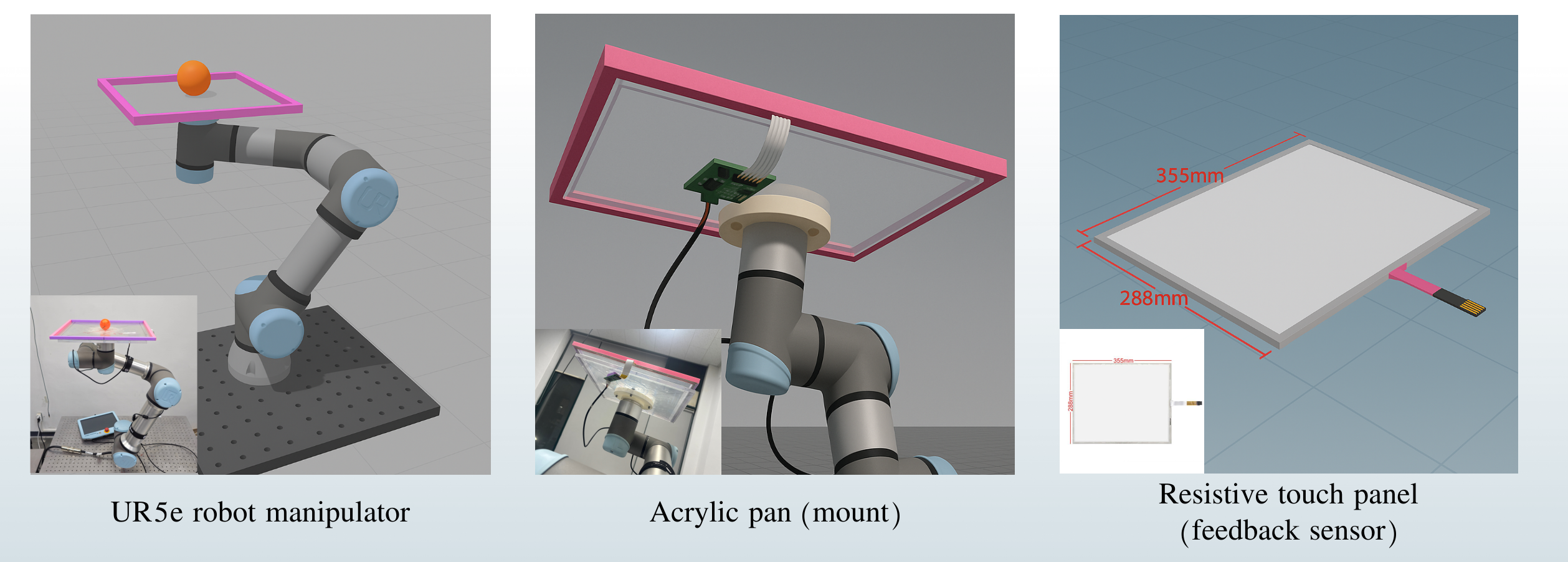
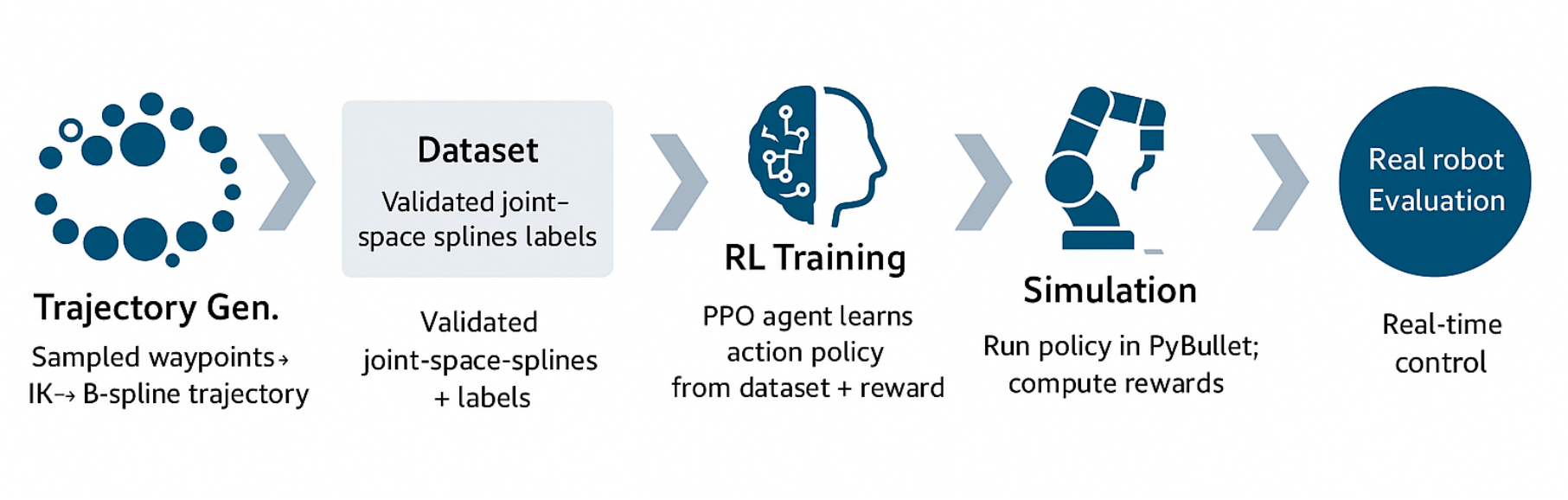
UR5e Ball Balancing (PPO)
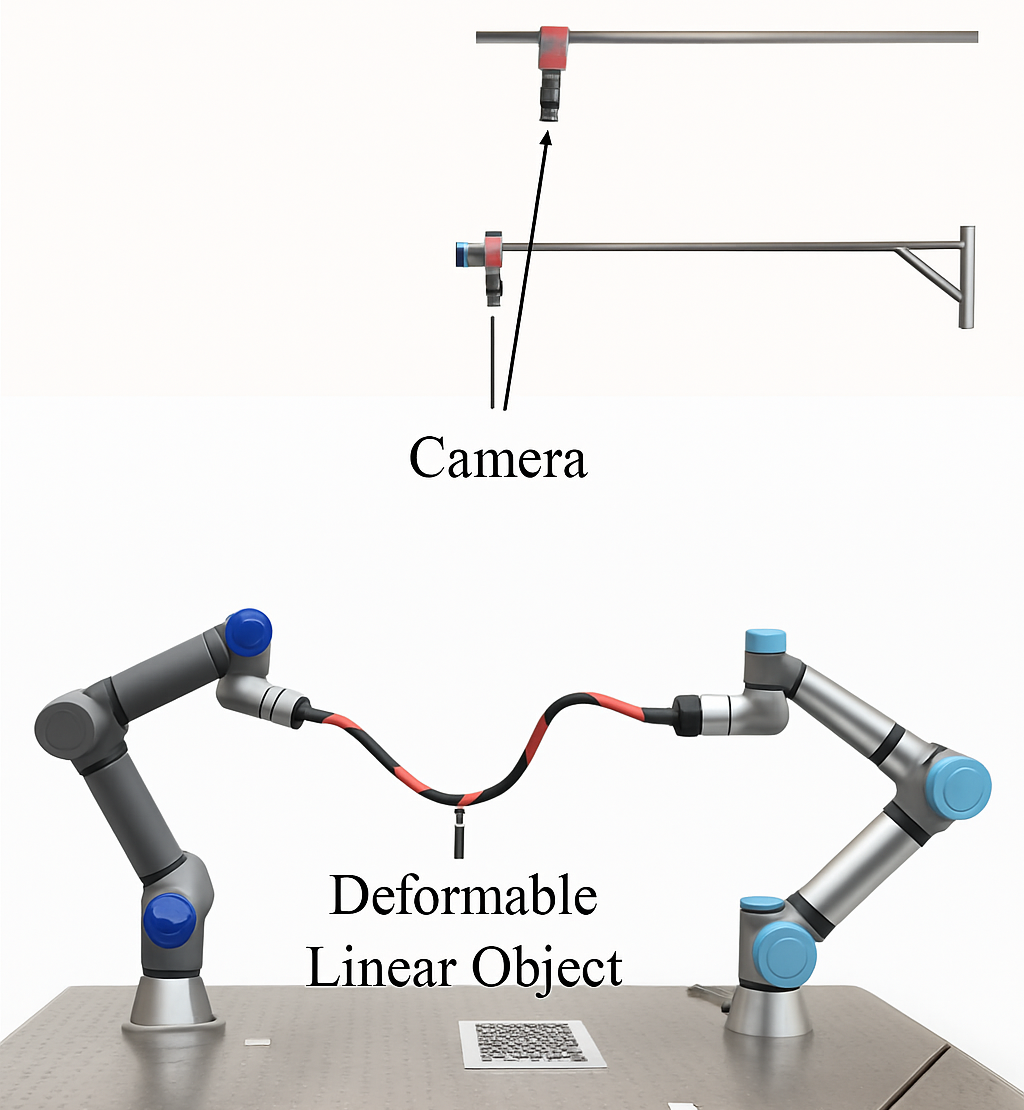
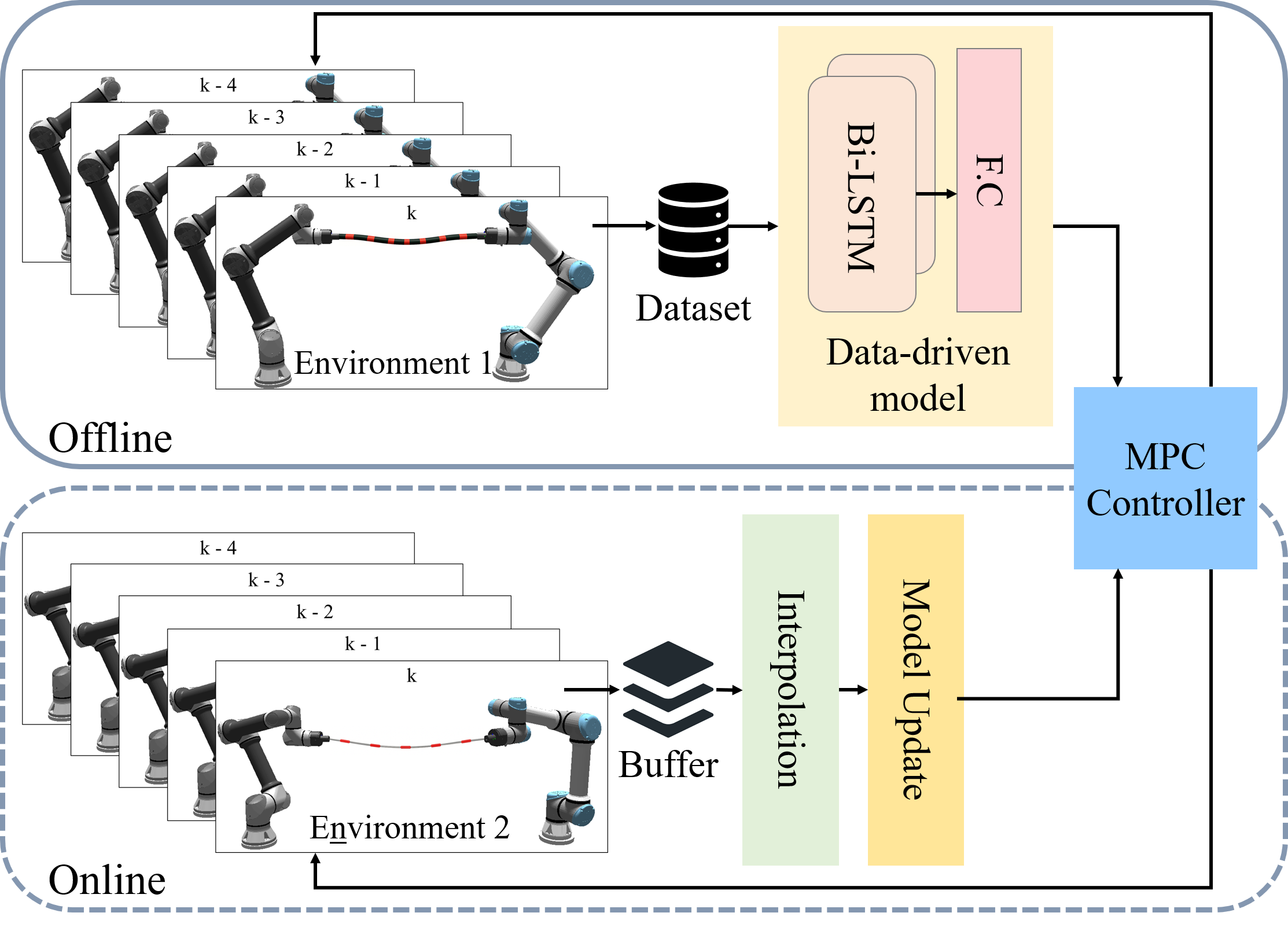
Deformable Linear Object (DLO) Manipulation & Tracking
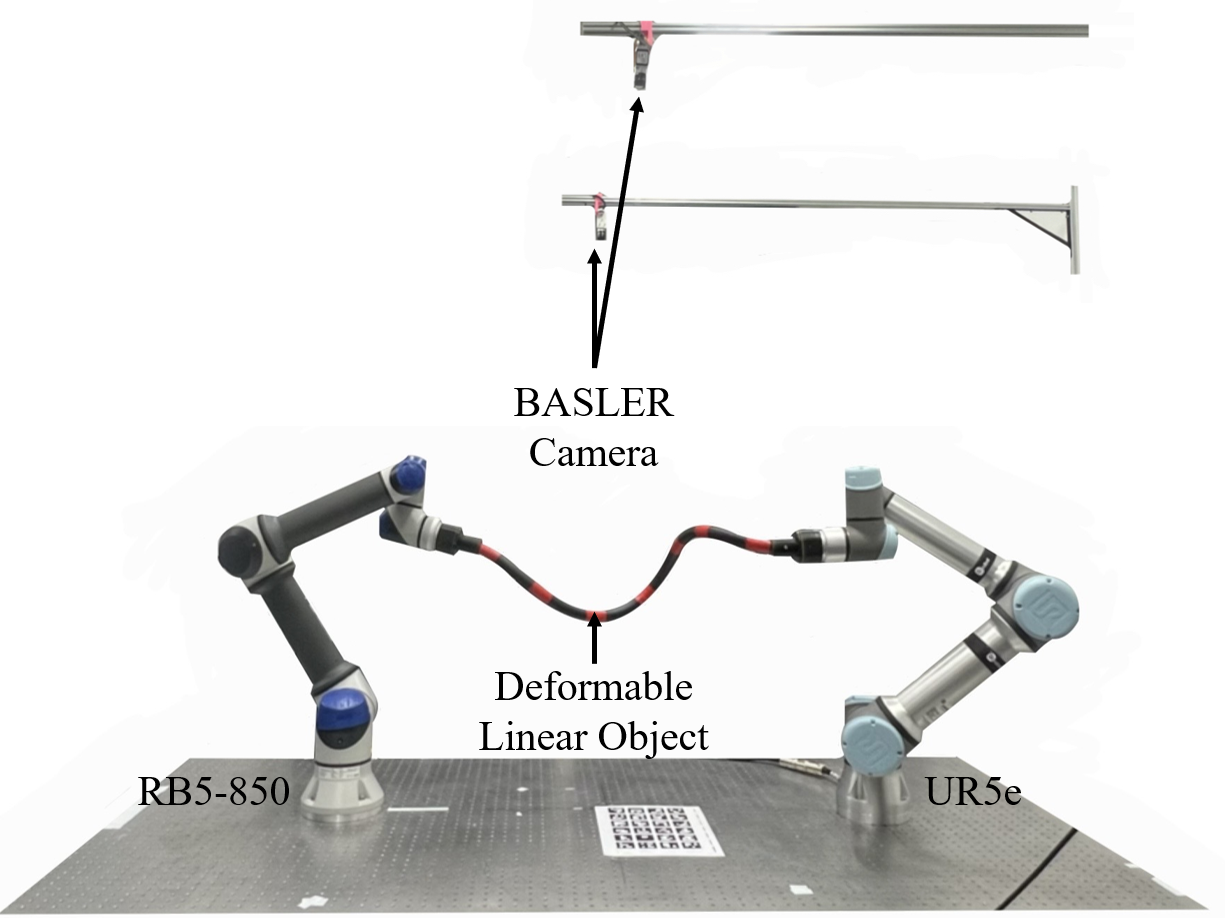
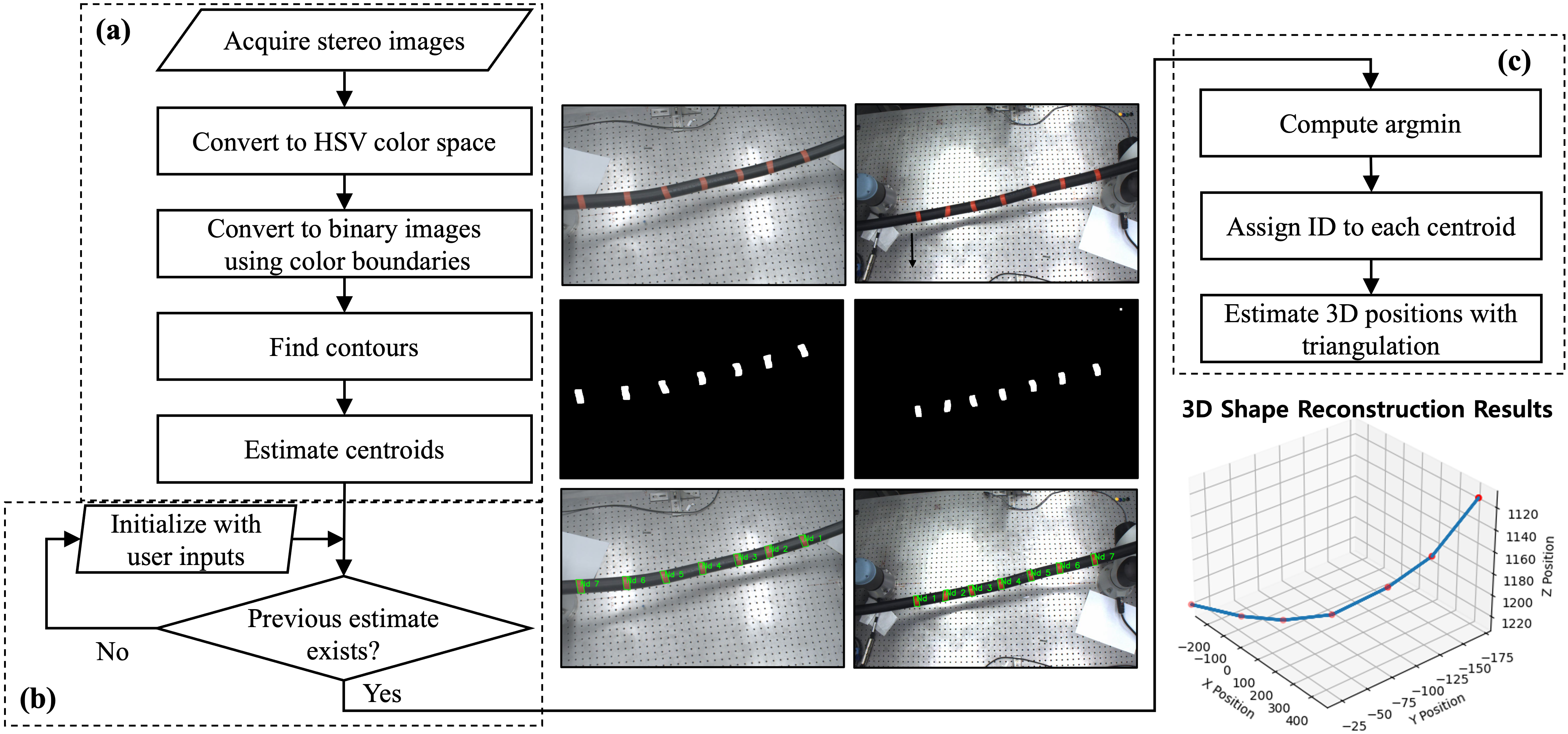
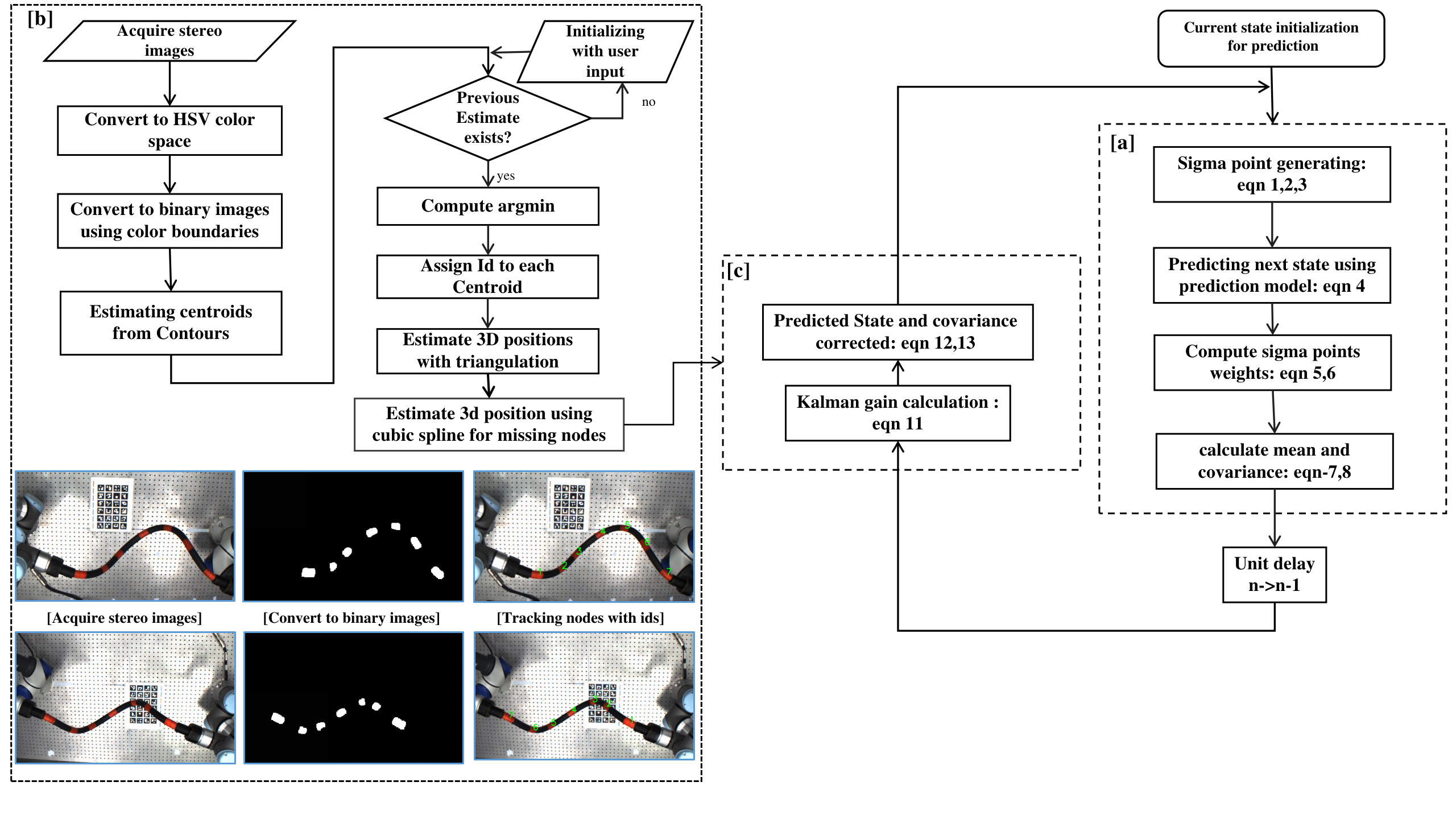
Stereo Vision–based DLO Tracking
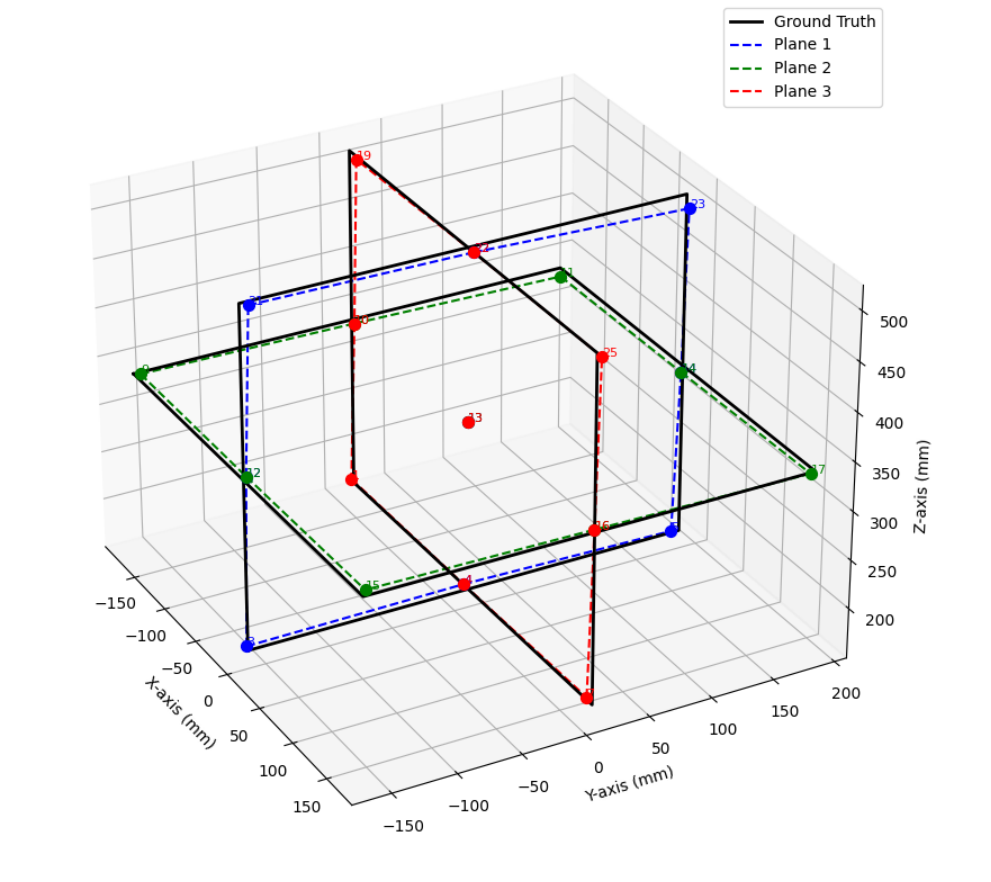
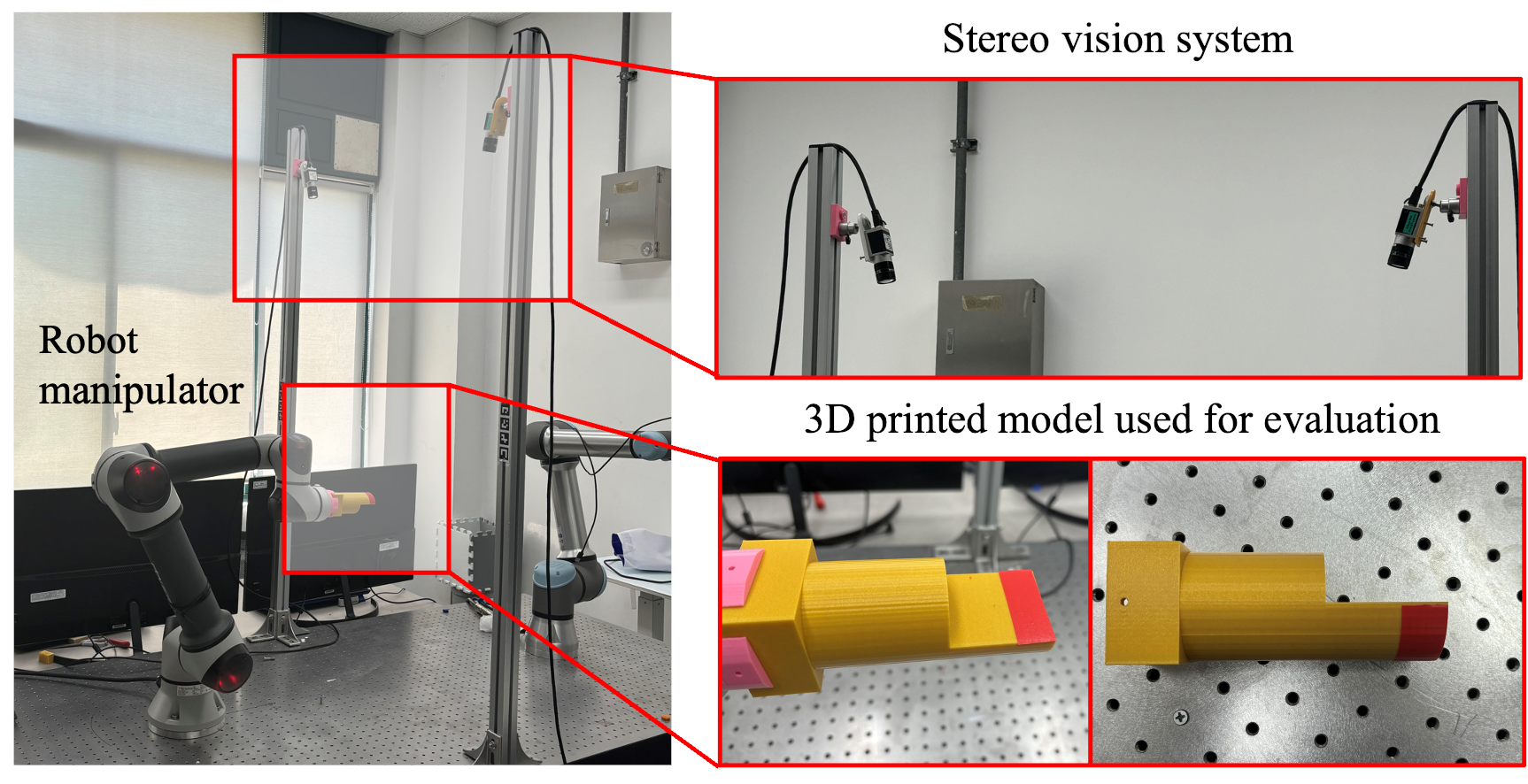
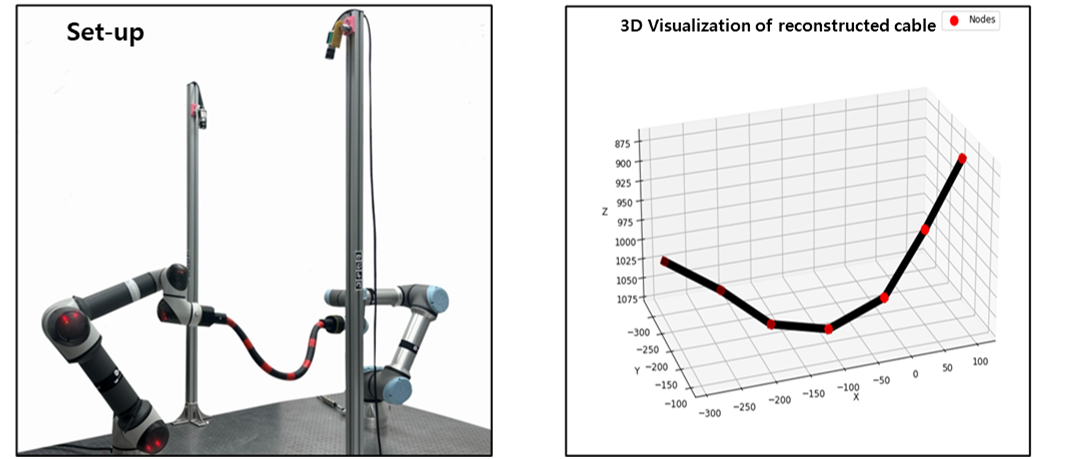
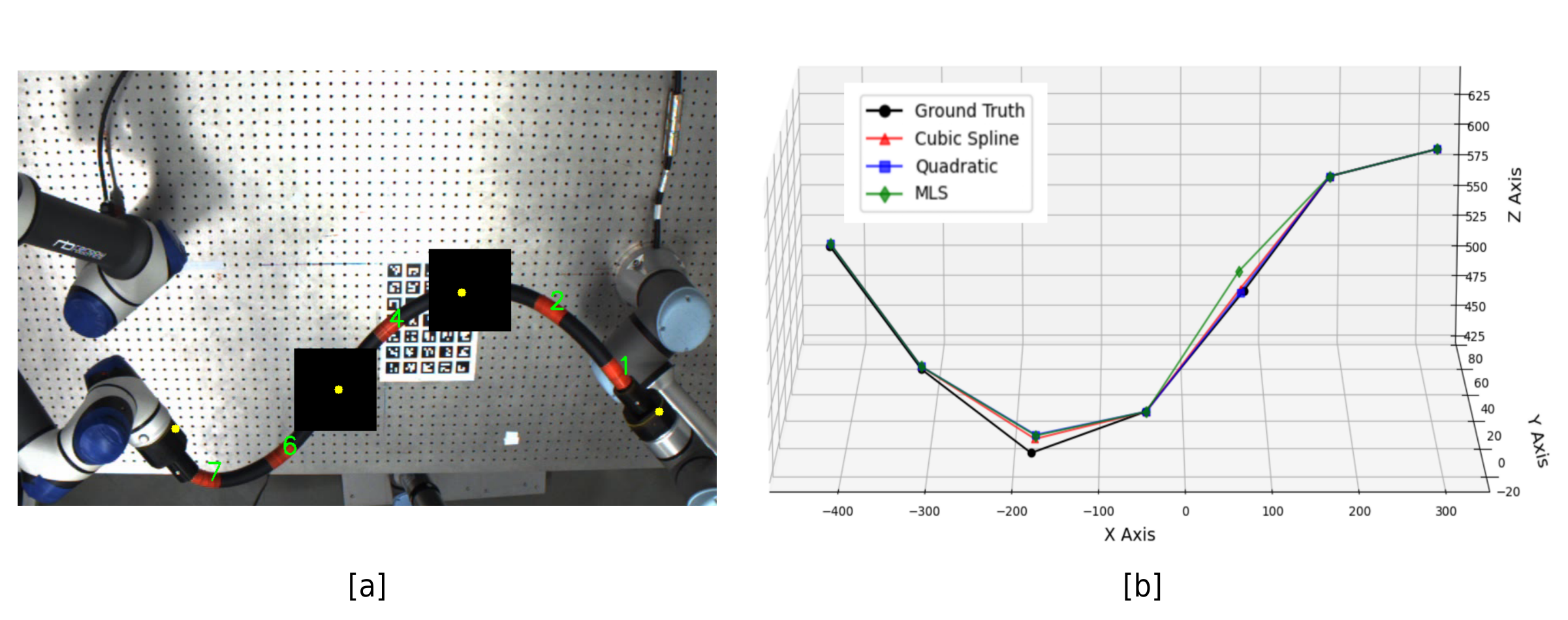
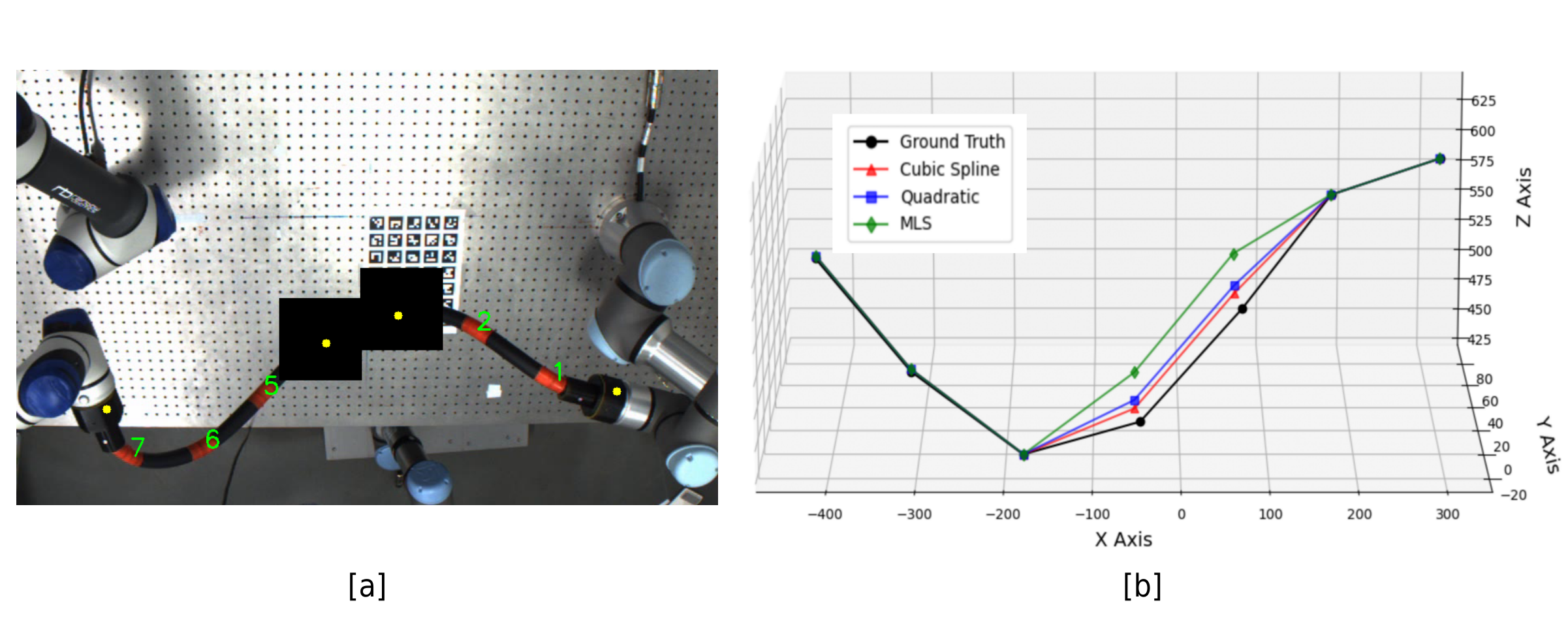
Experimental Spline Comparison
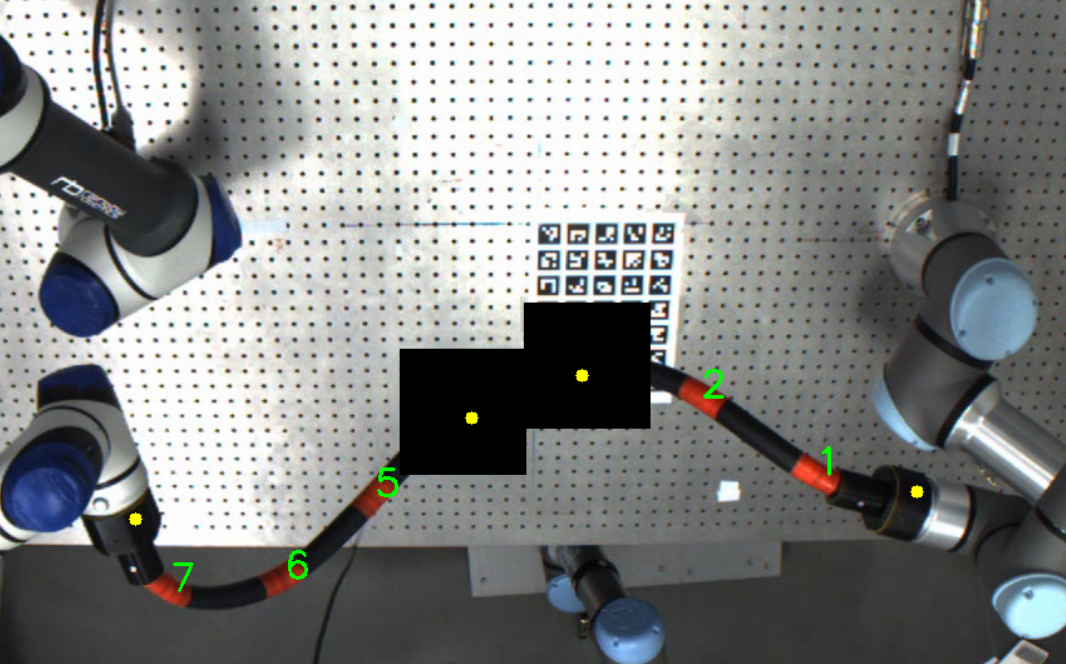
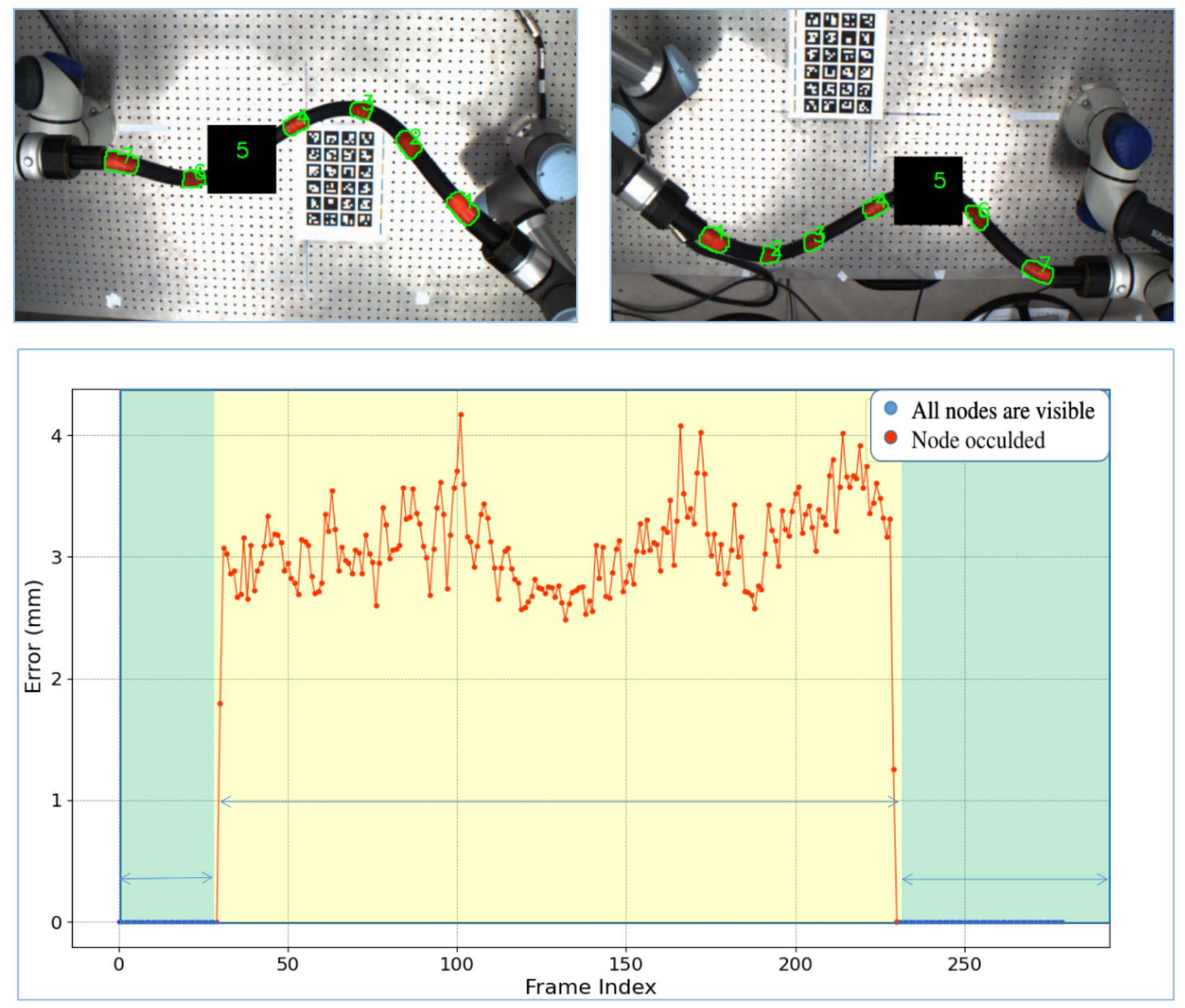
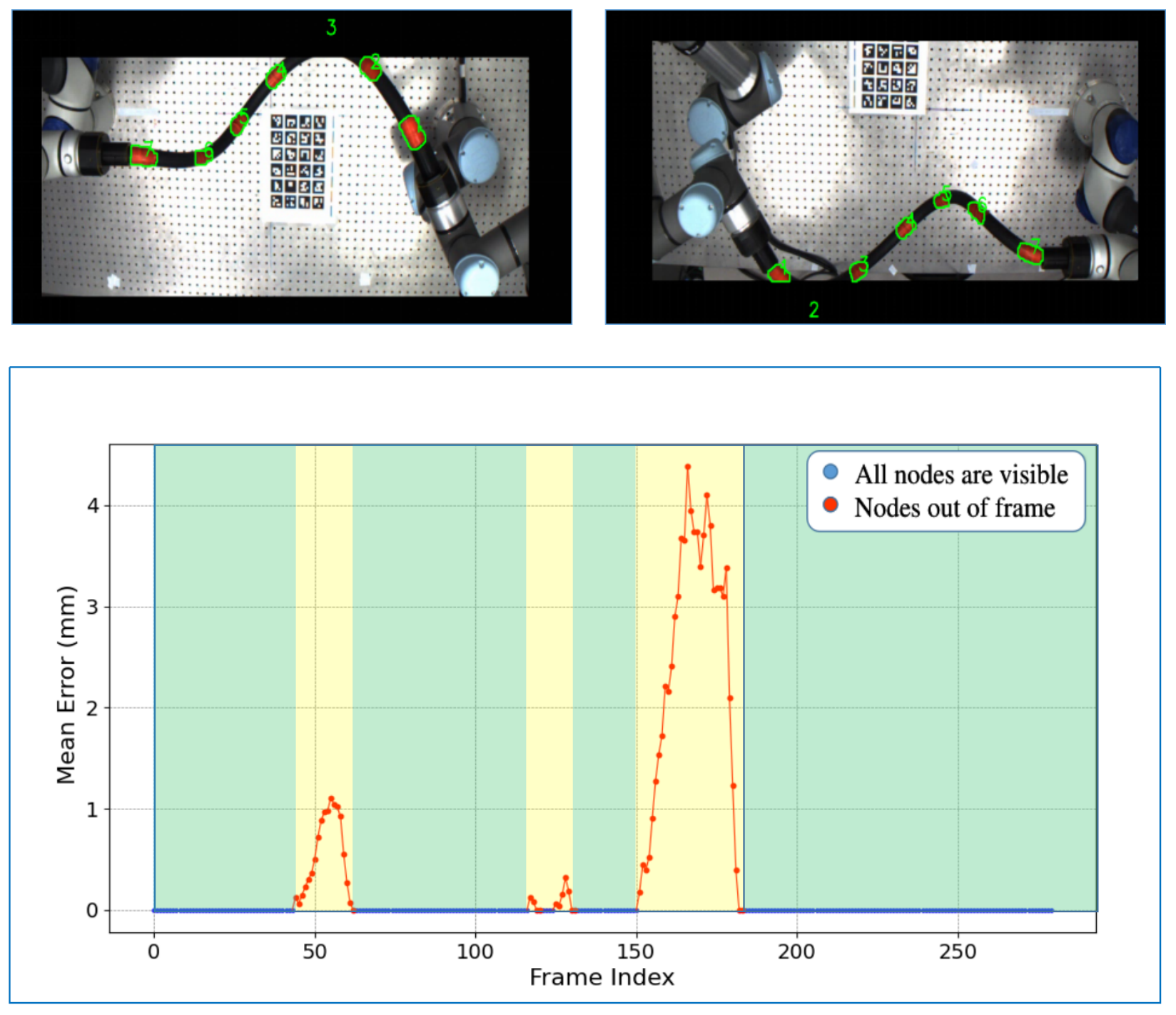
UKF for DLO Tracking under Occlusion
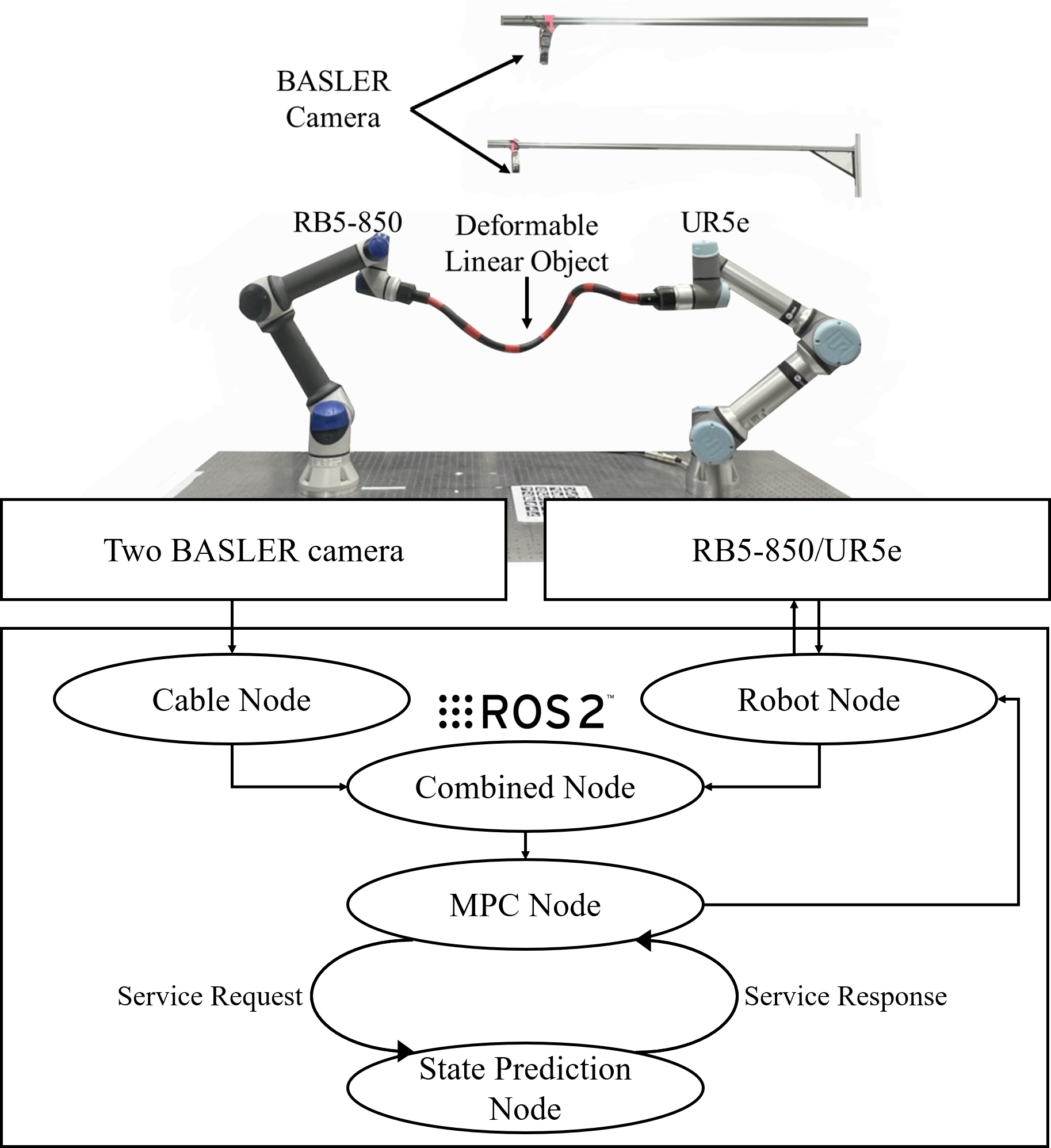
Dual-Arm DLO Shape Control
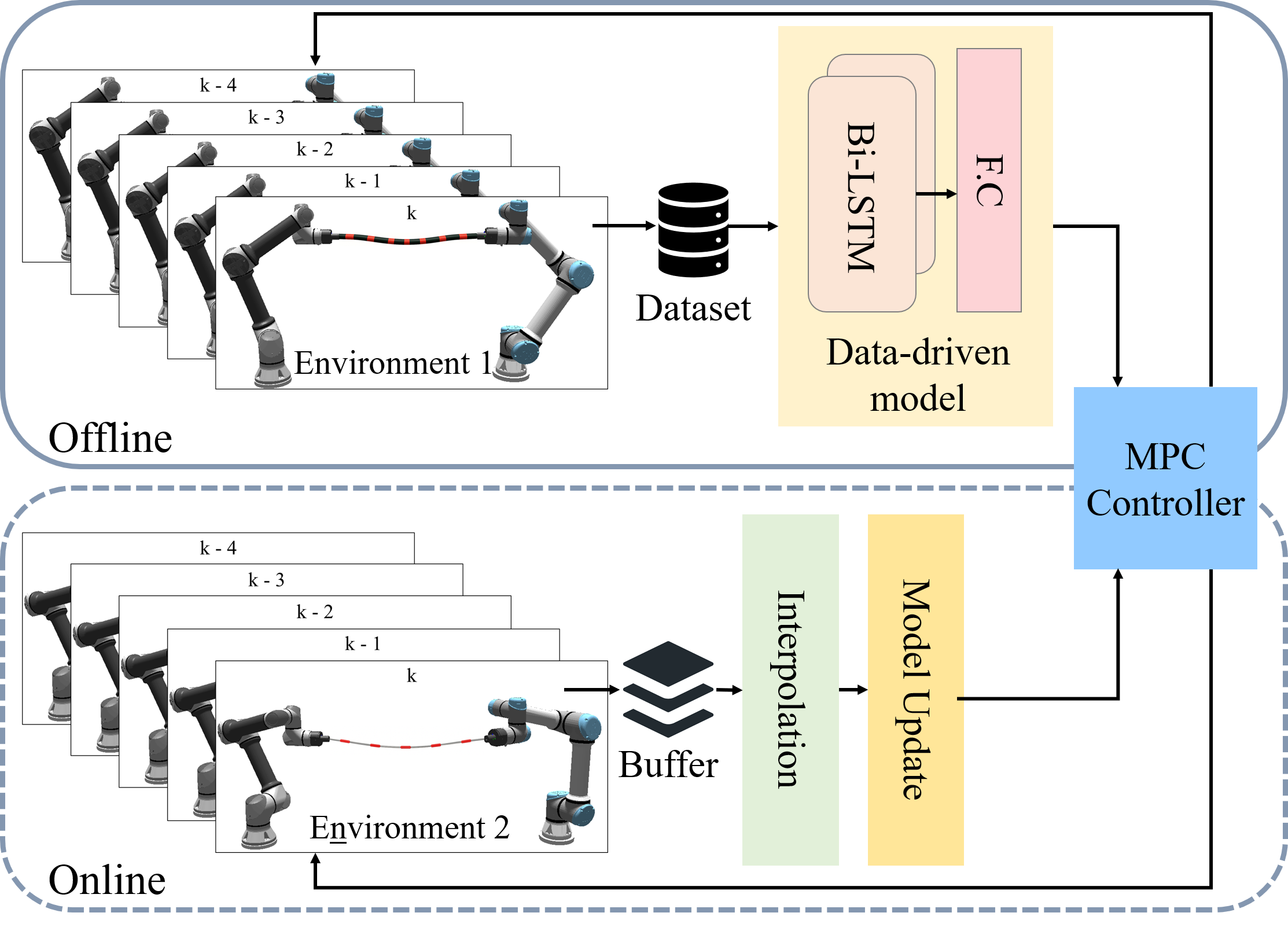
Deep Learning for DLO Dynamics

Projects
Resume
Advisor: Prof. Ayoung Hong (Website)
Insights & Notes
About Me
I’m Micheale Haileslassie Gebrezgiher, a fourth-year Mechanical Engineering student at Chonnam National University, supported by the Global Korea Scholarship (Undergraduate).
As a research assistant at the Autonomous Intelligent Robotics Lab (AIRLab), my work bridges robot perception and control. I’ve developed real-time stereo vision pipelines, spline-based state estimation with UKF, and reinforcement-learning controllers for tasks such as UR5e ball balancing and deformable linear object (DLO) manipulation.
I’ve authored and presented multiple papers at international venues including IFAC, ICCAS, and KSME. Beyond research, I’ve participated in innovation/startup programs in Silicon Valley, and I’m passionate about applying robotics and AI to real-world problems.
My long-term goal is to pursue graduate studies (MSc → PhD) and contribute to advancing collaborative robotics, human–robot interaction, and intelligent control systems.